Featured image: Mari Velonaki, “The Woman and The Snowman”. Responsive installation incorporating autokinetic robotic sculpture (2013).
I first met Mari Velonaki in person a couple of years ago and since then have attended one of her lectures. I was impressed by her work as a cross-disciplinary arts-led researcher. Also, her imaginative approach in her art practice which spans across interactive installations, robotics and kinetic sculpture and human-robot interaction. This interview is an opportunity for readers to find out more about the ideas and the contexts behind her work, including plans, dreams and also what is happening in Sydney Australia, where she is based.
Eva Kekou: I am fascinated by the project Fish-Bird, it operates as a metaphor for me to connect and relate two different notions in the most poetic way as in the case of art, science and technology. Could you please give us some information about the idea of this project and both its artistic and research views – also how audiences responded to this.
Mari Velonaki: “Fish-Bird” is an interactive autokinetic artwork that investigates the dialogical possibilities between two robots, in the form of wheelchairs, that can communicate with each other and with their audience through the modalities of movement and written text. The chairs write intimate letters on the floor, impersonating two characters (Fish and Bird) who fall in love but cannot be together due to “technical” difficulties. This was an interdisciplinary project that involved the creation of novel interfaces for human-robot interaction, experimentation in distributed sensory systems and robot ‘perception’.
The wheelchair was chosen as the dominant object of the installation for several reasons. A wheelchair is the ultimate kinetic object, since it self-subverts its role as a static object by having wheels. At the same time, a wheelchair is an object that suggests interaction – movement of the wheelchair needs either the effort of the person who sits in it, or of the one who assists by pushing it. A wheelchair inevitably suggests the presence or the absence of a person.

Furthermore, the wheelchair was chosen because of its relationship to the human – it is designed to almost perfectly frame and support the human body, to assist its user to achieve physical tasks that they may otherwise be unable to perform. In a similar manner, the Fish-Bird project utilizes the wheelchairs as vehicles for communication between the two characters (Fish and Bird) and their visitors. Finally, the wheelchair also possesses an aesthetic that is very different from the popular idea of a robot, as it is neither anthropomorphic nor “cute”. Given that a wheelchair is a socially charged object, the interactive behaviour and the scripting of how the chair should move was developed in consultation with wheelchair users. The participants are actively discouraged from sitting on the wheelchairs: if a participant sits on a wheelchair a sensor embedded in the seat upholstery pauses the entire system until the participant vacates the wheelchair.
What we’ve learned from the Fish-Bird project in relation to human-robot interaction, after 35,000 recorded encounters in five countries, is that behaviour is more important than appearance. Although Fish and Bird have the utilitarian appearance of an assistive device, participants were drawn to them because of the way they move and interact physically with them, and because of the handwritten style ‘personal’ messages that they print for their audience.
EK: Your project Diamandini brings up issues of femininity, interactivity into the context of computer and informatics. It again works as a nice metaphor but in practice it is a research project between the Centre for Social Robotics, Australian Centre for Field Robotics, the University of Sydney and yourself. Can you give us more information about this and also report to us about the outcome of the research project about the understanding of the physicality that is possible and acceptable between a human and a robot within a social space.
MV: The original intent of the Diamandini project was to create a robot that was non-representational and non-anthropomorphic – also, I wanted to work with the concept of one-to-one interaction: one human, one kinetic agent. As I started experimenting with a variety of abstract sculptural forms, although interesting in shape and structure, I found it extremely difficult to assign behaviours to them that could lead to emotional activation of the spectator/participant. These considerations influenced my decision to create a humanoid robot. This was a challenging decision, especially when I had to decide how the robot should look. I didn’t want Diamandini to have a typical humanoid robot aesthetic. I began to think of Diamandini as a female sculpture. In my mind Diamandini had a diachronic face that spans between centuries, a style that could be reminiscent of post-World War II fashion influences, and at the same time with futuristic undertones. Diamandini is small – only 155 cm high. I wanted her figure to be small and slender so that people didn’t feel threatened by her when she ‘floats’ in the installation space. I wanted her to look youthful, but not like a child, and for her age not to be easily identifiable. Interestingly, in my mind she is between 20 to 35 years old. Because I am a woman, I feel more comfortable working with a female rather than a male representation.
In relation to people interacting with Diamandini in social spaces, we are still processing data collected from 3,682 interactions at the Victoria & Albert Museum in 2012. From these interactions what we know so far is that, although people would spend – on average – more than five minutes with her in the Medieval and Renaissance Galley, only 88 people embraced her or held her hand. It will be interesting to compare this result with new data coming from Diamandini’s current exhibition at FACT, Liverpool, where she is exhibited in a contemporary gallery setting.
EK: You are an artist and researcher. How do you think that these two relate to each other, give feedback to each other and can give a mutual input to your work? How connected are art and research in general?
MV: I see my work as practice-led research. I’m interested in developing and testing new concepts of what an artwork can be, in the same way as I’m having conceptual and aesthetic concerns of what a robot can be. Interactive media art has a long history of looking at sharing spaces with projected and kinetic characters. I’m interested in the brief moment when a spectator becomes a participant – conceptually and physically. This is where the core of my research lies.
EK: The female character and femininity plays a crucial role in your work. How can “fragile femininity” be embraced by science and technology and its connected artwork under the light of media art?
MV: I don’t perceive my work as fragile femininity – at least consciously. Many of my characters don’t have gender: for example Fish-Bird, Fragile Balances, Current State of Affairs. If a representation of gender is necessary – as in previous works that contain projected digital characters (Pin Cushion, Unstill Life, etc.) or is a humanoid robot – I choose to work with female forms as I am more comfortable to sculpt, script and create a kinetic language for a female representation. The element of fragility, though, is a thread that links many of my works. Anne-Marie Duguet wrote a wonderful essay “The Power of Vulnerability” about my work ‘Fragile Balances’ (2008) in which she writes “’A fragile balance’ could define all complex interactive processes that involve human intervention. Interactivity always extends to the limits of more than one language, more than one reality. It relies on operations of interpretation and coding that, as a matter of course, produce slips of meaning, simplifications and omissions which can undermine the effectiveness and reciprocity of exchange, and hinder the pleasure of transgression.”

EK: I know you have exhibited in different parts of the world – how do audiences respond to your work?
MV: I guess it depends on the work. In general I think maybe I could add that I think people are attracted to my work because – although it partially depends on complex technological systems – the work itself doesn’t look at all technological. I want to believe that my audiences are attracted to my ‘characters’ maybe because of the element of surprise: a porcelain-like sculpture that moves; wheelchairs that write love letters; wooden cubes that act as embodied avatars for robotic characters.
EK: What are your next steps as an academic, artist and researcher? Which of your dreams do you want to make true through your work (relating them to art, science and technology as another metaphor)?
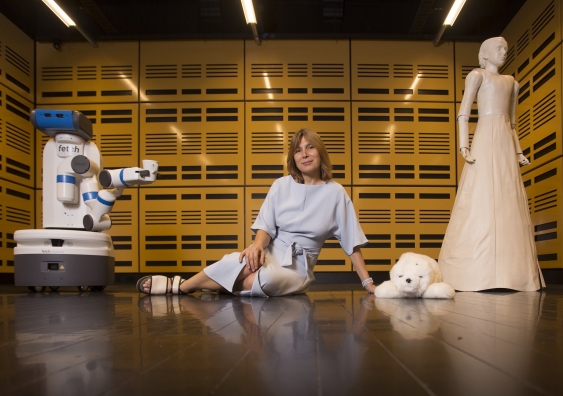
MV: At the moment a lot of my focus is on growing and strengthening the Creative Robotics Lab (CRL) at NIEA. I founded CRL with an aspiration to build a cross-disciplinary experimental space for human-robot interaction research and interface design. At CRL people from different disciplines – arts, robotics, psychology, philosophy – work together because they believe that, to improve human-robot interaction, a cross-disciplinarily approach is not complementary but essential. CRL for me is a safe place for risk-taking.
Mari Velonaki has worked as an artist and researcher in the field of interactive installation art since 1997. Mari has created interactive installations that incorporate movement, speech, touch, breath, electrostatic charge, artificial vision and robotics. In 2003 Mari’s practice expanded to robotics, when she initiated and led a major Australian Research Council art/science research project ‘Fish–Bird’ (2004-2007) in collaboration with roboticists at the Australian Centre for Field Robotics (ACFR). In 2006 she co- founded, with David Rye, the Centre for Social Robotics at ACFR, a centre dedicated to inter-disciplinary research into human-robot interaction in spaces that incorporate the general public. In 2007 Mari was awarded an Australia Council for the Arts Visual Arts Fellowship. In 2009 she was awarded an Australia Research Council Fellowship (2009–2013) for the creation of a new robotic form. In 2011 she was appointed as an Associate Professor at the National Institute of Experimental Arts (NIEA) at the College of Fine Arts, The University of New South Wales, where in 2013 she founded the Creative Robotics Lab. Mari’s artworks have been widely exhibited internationally. http://mvstudio.org/